I am a robotics engineer with expertise in simulation development, narrowing the sim-to-real gap by creation of high-fidelity virtual environments to accelerate robotic testing and deployment. I am particularly passionate about reinforcement learning and imitation learning, exploring control strategies that enable safer, more human-like interactions.
I am currently pursuing my Master's degree in Electrical Engineering at Stanford University. Previously, I earned my Bachelor's degree in Mechatronics Engineering from the University of Waterloo. I also conducted human-robot interaction research at the Active Robotics Interaction Lab under Dr. Yue Hu, with a publication on IEEE Robotics and Automation Letters.
When I'm not building robots, you can find me hiking, playing my clarinet and accordion, or exploring new cuisines around the city.
Hi, I am Ji Yuan 'Steven' Feng
I am a _
I am a robotics systems engineer passionate about bringing autonomous and biomimetic robots to life.
About

NVIDIA
2023 to Present
GR1 humanoid robot imitation learning policy
H1 humanoid robot tries to front flip
Teach H1 humanoids how to walk
Robotics arm pick and place example
Dextrah manipulation task
Franka robot moveit integration
Reinforcement learning based drawer manipulation
High fidelity claw simulation
Ackermann steering simulation for RC car
Outdoor robot simulation
Agility humanoid robot locomotion policy

Giving a presentation on building robot digital twins at GTC 2025

ROS software-in-the-loop simulation lab at GTC 2025
Presenting the next generation physics engine Newton at GTC 2025

Giving a talk on reinforcement learning for humanoids at SIGGRAPH 2025
Presentation on tuning dexterous hands at GTC 2026
At NVIDIA, I worked on both Isaac Lab and Isaac Sim, focusing on distinct facets of robotic simulation. In Isaac Lab, I developed scalable humanoid and legged robot models and designed reinforcement learning-based locomotion policies. In Isaac Sim, I concentrated on high-fidelity simulation, building realistic digital twins, synthetic sensor models, and inference pipelines for deploying trained policies through ROS and Isaac Sim. I also presented several talks at NVIDIA GTC on robot composition and software-in-the-loop simulation pipelines.
Education
University of Waterloo
Bachelor of Applied Science in Mechatronics Engineering with AI Option, with Distinction
Active Robotics Interaction Lab
Researched human perception of robot behaviors under Dr. Yue Hu, paper published in IEEE Robotics and Automation Letters
Stanford University
Master of Science in Electrical Engineering (In Progress)
Publications
Configure and Tune Robot Assets With OpenUSD and PhysX
NVIDIA GTC 2026
Quantifying Human Mental State in Interactive pHRI: Maintaining Balancing
IEEE Robotics and Automation Letters, 2025
Learn OpenUSD: Robotics Best Practices
ACM SIGGRAPH, 2025
Digital Twin Robotics: Immersive Software-in-the-Loop Testing with OpenUSD, Isaac Sim, and ROS
ACM SIGGRAPH, 2025
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
NVIDIA White Paper, 2025
Software-in-the-Loop Testing for Robots With OpenUSD, Isaac Sim, and ROS I
NVIDIA GTC 2025
Learn OpenUSD: Robotics Best Practices I
NVIDIA GTC 2025
Internships
Tesla
Developed lighting apps for new Model S/X and Tesla Semi, including Tesla Light Test.
NVIDIA
Built realistic sensors and simulated quadruped robots in NVIDIA Isaac Sim's robotics platform.
ecobee
Built production test fixtures and CV/ML algorithms for smart thermostat display testing.
University of Waterloo, Faculty of Electrical and Computer Engineering
TA for intro C++ course; led tutorials, graded, designed exams.
Khazanah National Americas
Explored drone, CV, and AR/VR tech to support investor understanding and decision-making.
Ford Motor Company
Supported F150 Lightning development and testing using Jenkins, TestStand, C#, Python.
Projects

Airplane Project (2020)
The sky is calling!
In this project, I built a remote controlled airplane from scratch using raspberry pi and esp8266 modules, and designed software and mechanical architectures from scratch in a team of two.

Watonomous
Bolty!
Watonomous is a University of Waterloo design team that turns a chevy bolt to a level 4 autonomous vehicle. At Watonomous, I worked on local planning for the vehicle, particularly with the MPC controller and gained valuable experience with ROS.
Capstone Project (2023)
Multi-robot exploration and SLAM in a simulated warehouse
Multi-robot SLAM system for exploring and mapping a 80000 sqft virtual warehouse.
Webapp Hackathon Projects
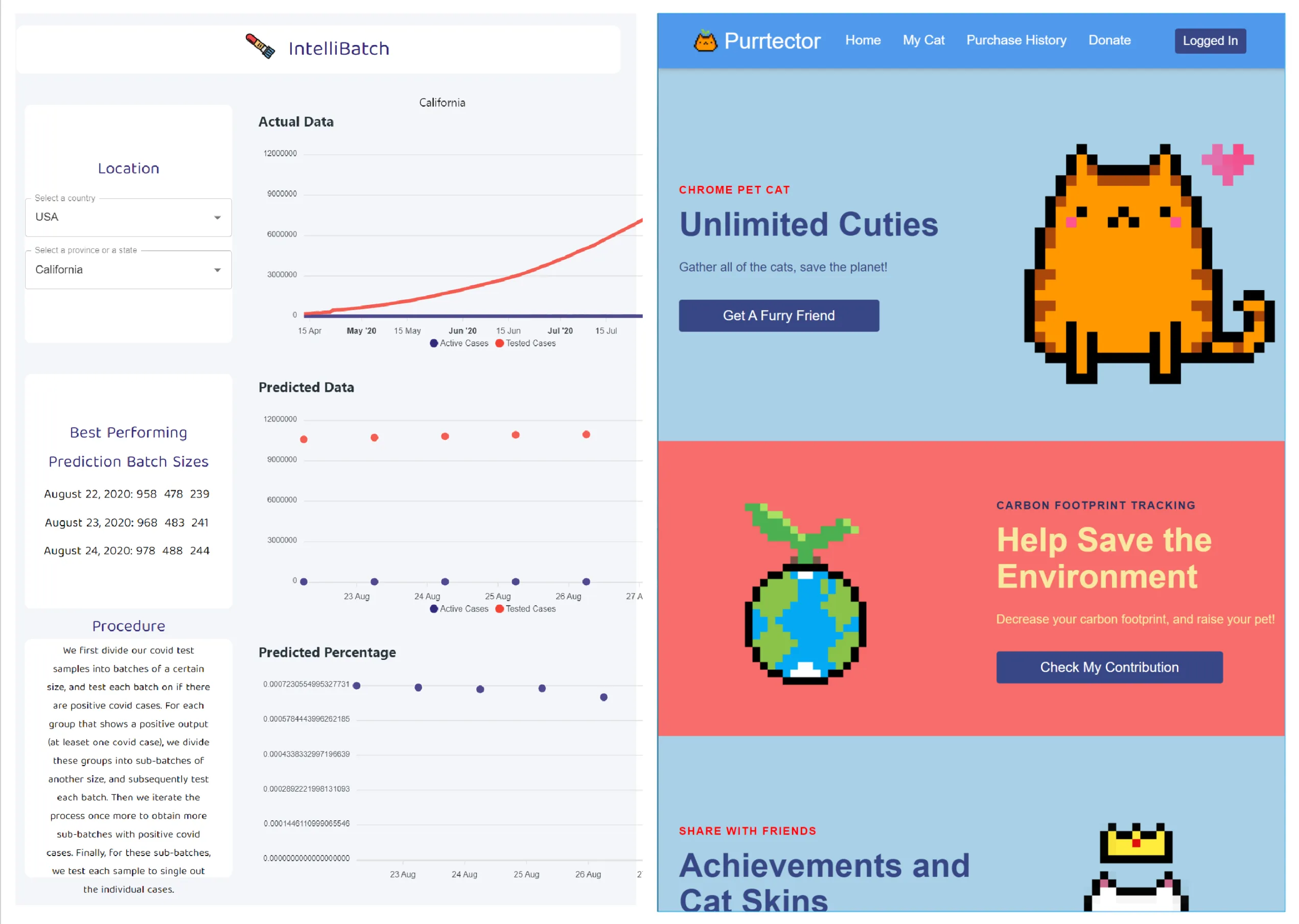
Best Use of Google Cloud Award (Purrtector, NWHacks 2021)
Intelibatch (left) is a webapp for displaying and predicting COVID19 cases across North America using React (front end), Flask (back end), and Tensorflow (prediction) to compute the optimal batch size for repeated testing. Purrtector (right) is a chrome extension for encouraging planet positive behaviors by rewarding users with digital pets using React and Flask.
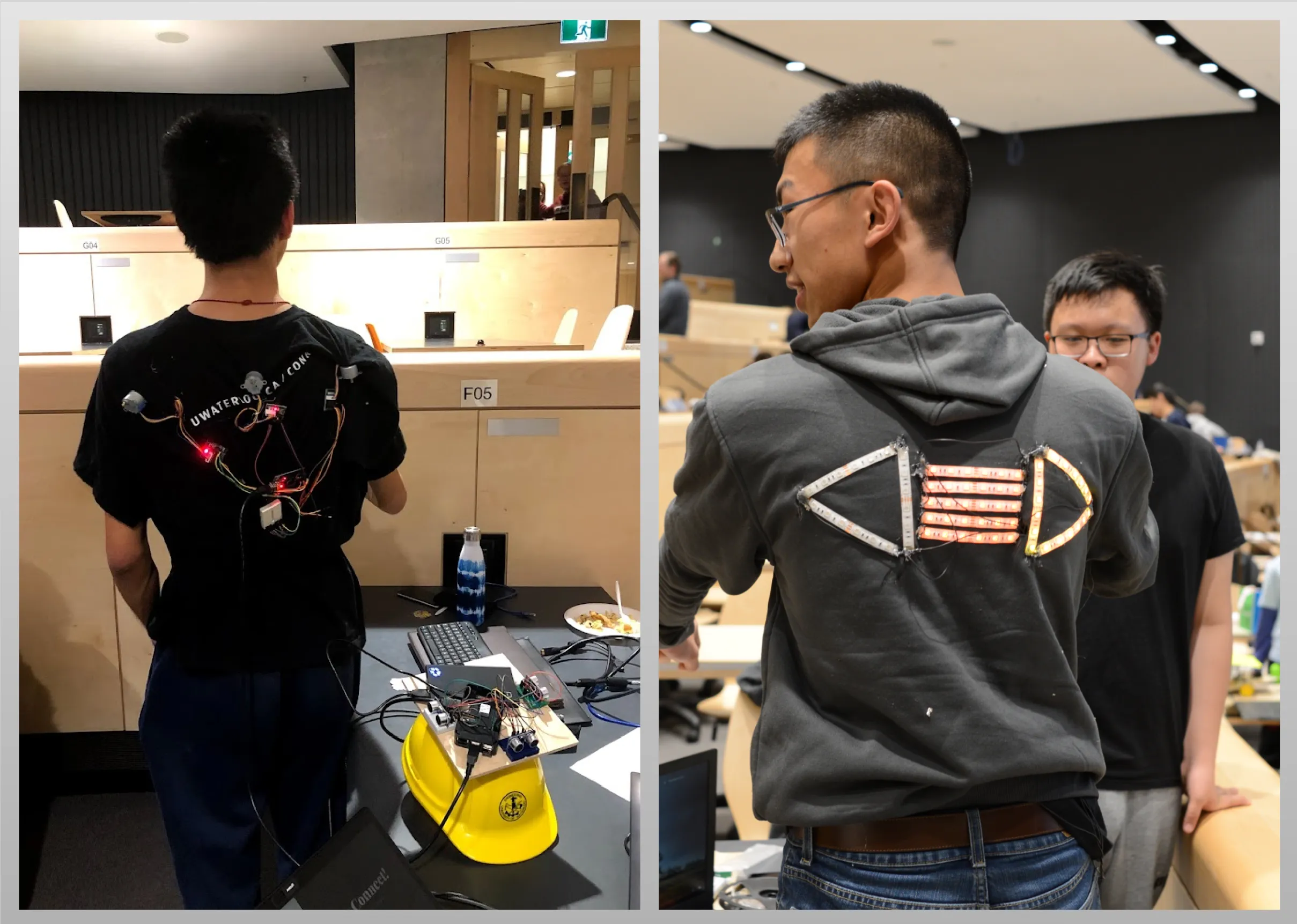
Wearable Hackathon Projects
1st Place (VisionSense, MakeUofT 2019)
VisionSense (left) is an IoT outfit to haptically guide users with visual impairments/obstructions while monitoring their environment. Nightlight (right) is a wearable that allows bike users to signal turns at night via motion-sensing technologies which will activate turn lights.
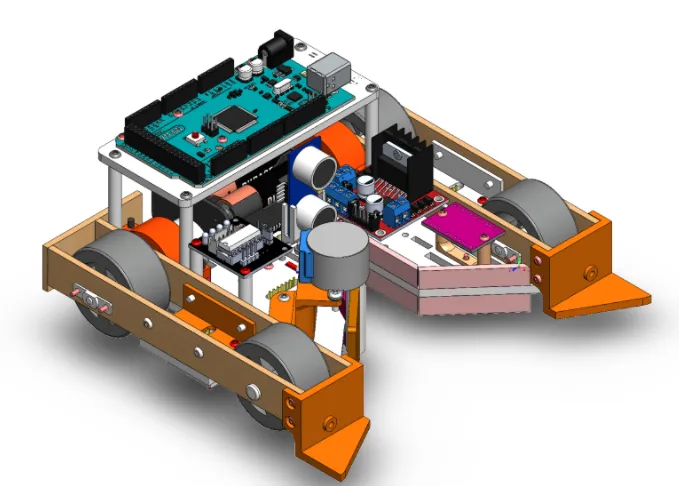
BOFA, the Line Follower Robot
2nd highest competition mark
Lead the mechanical design for a line following robot using SolidWorks, drafted Bill of Material, and oversee software, mechanical, and electrical developments as project manager
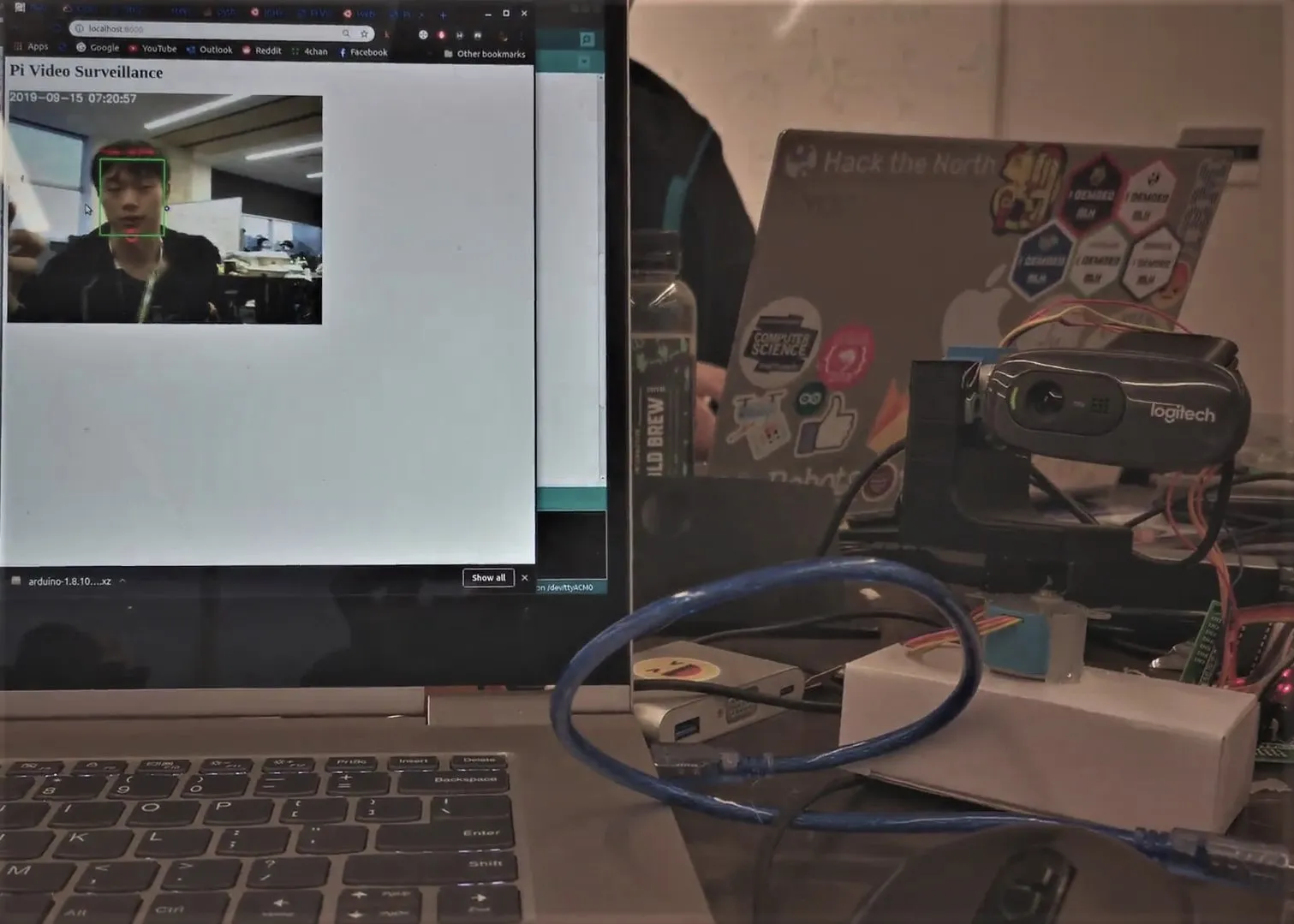
HiSecurity!
Hack the north, 2019
This camera system which utilizes machine vision (OpenCV and Sktlearn) to physically track and identify faces using the stepper motors onboard. The handy ui also enables users to track the system remotely and in real time.

VEX Robotics
Finalists, Alberta Provincial Championship 2017 and 2018
Over the three years, we explored various robotics systems such as holonomic drives, reverse double four bar lifts, and even learned C programming and programed PID controllers from scratch in a team of three.

Pilot
"Oh! I slipped the surly bonds of earth and danced the skies on bright yellow wings."
I finally touched the sky when I earned my glider pilot license in 2016 and private pilot license in 2017. This was an breathtaking experiences that inspires me to build robotics airplanes to this date.
Skills

C, C++, C#, CUDA

Python, MATLAB, R

Arduino, Raspberry Pi, ESP8266

OpenCV, Tensorflow, Pytorch

Solidworks, AutoCAD, Blender

ROS, ROS2, Gazebo

Isaac Sim, Isaac Lab

Private Pilot, Glider Pilot License